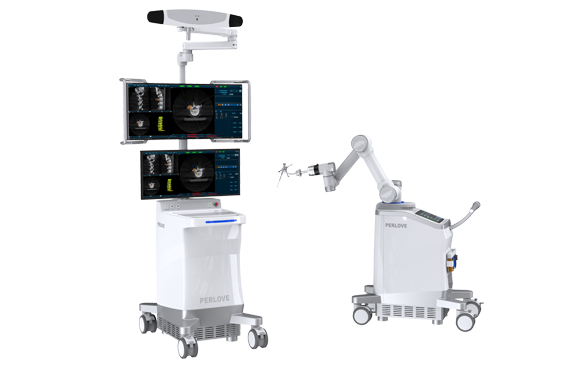








Surgical Navigation System PL300B

Description
Overall solution for next episode of spinal surgery.
Features & Benefits:
Elite in details:
• Optical measurement camera: Tracking and navigating in sub-millimeter accuracy
• Overall tacking/processing unit: Overall design of workstation and optical measurement camera helps to maximize space in the OR
• 34 inches LCD surgical monitor: Large angle rotatable and large size LCD monitor for easy image reviewing
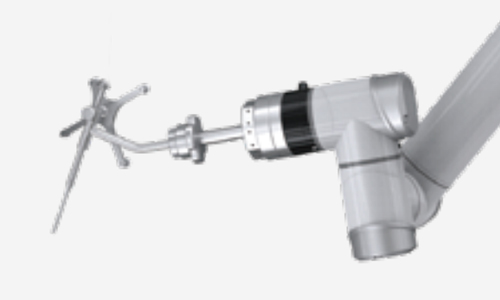
• 3D reference marker: Navigate the instrumentation guide to the right position through pre-op plan
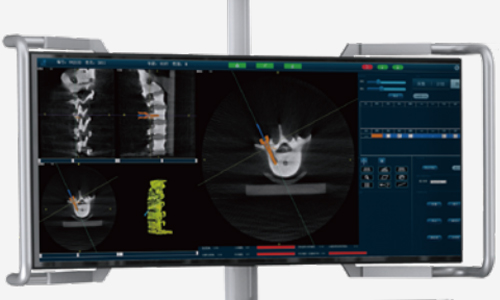
• Pre-op planning system: Screws’trajectory and position planning
• 29 inches workstation monitor: Displaying real-time modified plan and mechanical sensor feeback
• 6-way directional moving robotic arm: State-of-art robotic arm and built-in force sensor provide high accruateinstrumentation
Self-adaptive calibration:
Perlove Medical is the first manufacturer in China that combines intraoperative 3D imaging C-arm and spine surgical navigation system.
Equipped with the intraoperative 3 D imaging C arm system which independently developed and produced by Perlove, PL300B, which integrated with self-adaptive calibration technology, can realize image automatic registration, and automatically estab-lishes the association of three coordinate systems, the optical position gauge, the patient and the image.
No manual intervention is required in registration process, and the accuracy is not affected by the image quality. It brings stron-ger system compatibility, more accurate coordination matching and more convenient calibration.
• Self navigation: Surgical arm can be precisely sent to the right position through wellplanned trajectory, ensuring consistency between pre-op surgicalplan and intra-op surgical outcome.
• Real time motion tracking: Real time motion tracking and position modifing, ensuring precise screw placement.
• High-precision robotic arm: The smart navigation system and robotic arm deliver high degree ofaccuracy, effectively decreasing complication rate and revision rate.
• Positioning with accuracy: Equipped with cutting-edge optical tracking sensor and robotic arm,PL300B utilize intraoperative 3D based imageto make pre-operative plan, allowing surgeon to performspinal MIS with submillimeter accurate navigation.Especially for high-risk and complex procedure, it hasobvious advantages and can effectively reduce surgicalrisk.
Precision treatment:
• Pre-op surgical planning: The software utilize 3D image to make surgcial plan for the idealscrew position, calibers and instrumentation trajectory.
Extend the capability of MIS - Minimally Invasive:
• Percutaneous fixation: With the reference percutaneously fixed to the patient,additionalinjury can be largely avoided, making the patient recovery fast afterthe surgery.
• Small incision: In traditional open approach spinal surgery, wider incision is necessaryto expose cnough anatomy for surgeon.However, small incision of only1-2cm will give enough space for instrumentation in robotic assistedsurgery, saving 50% surgical time, reducing 95%blood loss with a lowcomplication rate.
Simplify surgical workflow - Simplication Muti-purpose:
• Optimized surgical workflow: PL300B is capable to have multiple pedicle screws trajectoryplanned in a single operation compared with traditional openapproach, saving surgical time spent and improving screw place-ment efficiency.
• Standardized surgical workflow: User friendly navigation software interface, eliminating uncertaintyof complex spinal surgery, creating a standardized surgical work-flow with reduced learning curve.
• Multiple vetebral levels planning: Planning for multiple vertebral levels,enabling visualization ofcntry point,screw angle and trajectory for various spinal procedure(e.g.PKP,LIF)
Intelligent surgical experience carry outsafe and convenient surgical outcome:
• Overall roll cart design: Overall design of optical camera and monitor cart brings out smaller footprint and more flexible maneuverability.
• Articulating monitors: Medical grade articulating monitors provide multiple observation perspective with delicacy clarity.
• Stable surgical plan operation: Precise surgical planning operation carried out by robotic arm, greatly saving surgeon’s enegry in long duration operation.
• Human-machine collaboration: Surgical plans are conducted by surgeon and carried out by navigation system.
• Motion simulation and mechanical sensor: Built-in motion simulation and mechanical sensor enable the robotic arm to stop moving immediately when it encounters an obstacle, preventing collision accident.
Lower radiation level Shorter surgical duration:
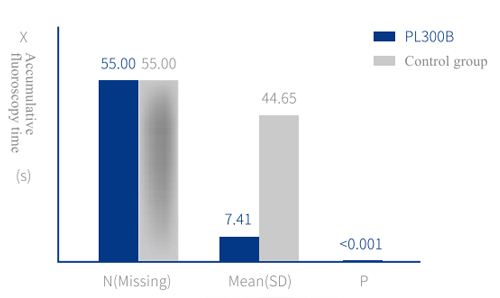
• Reduce radiation absorption: In robotic-assisted surgery, the total amount of radiation dose,fluoroscopy duration and times are greatly reduced, bring safetyand care for both patient and surgeon. The radiation level in robotic assisted surgery is only 18% of free hand surgery
• lmproved surgery efficiency: The fluoroscopy time for each screw placement in robotic assistedsurgery is 2.3s compared with 39s in free hand surgery, whichgreatly reduce operative time, improving 30% surgery efficiency.
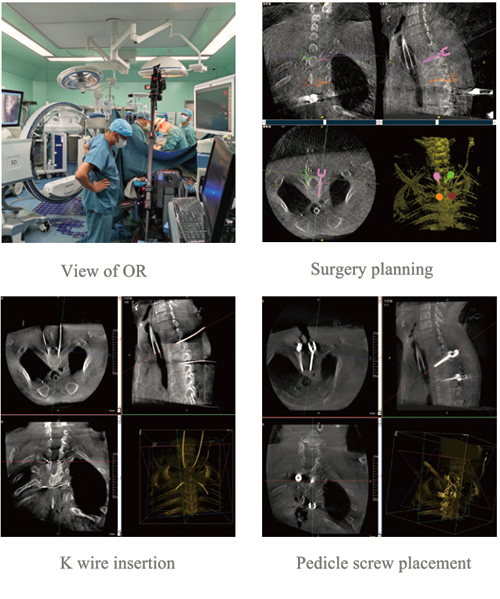
T2,T4 pedicle screw fixationin robotic-assisted surgery:
• Description: Male, 45 years old
• Surgery: Spinal tumor separation with T2,T4 pedicle screw fixation
• Numbers of screws: 4
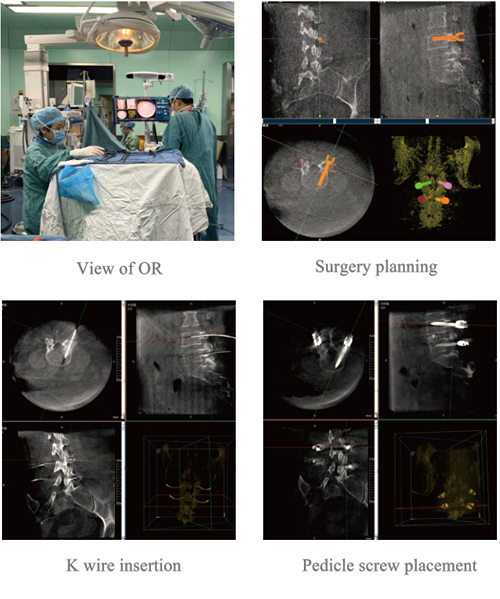
L4, L5 pedicle screw fixation in robotic assisted surgery:
• Description: Femle, 50 years old
• Surgery:L4,L5 pedicle screw fixation
• Numbers of screws: 4
- Brand
- Perlove
- Model
- PL300B
- Country of origin
- China
- Listed on
- May 25, 2023
- Listing id
- 922929